










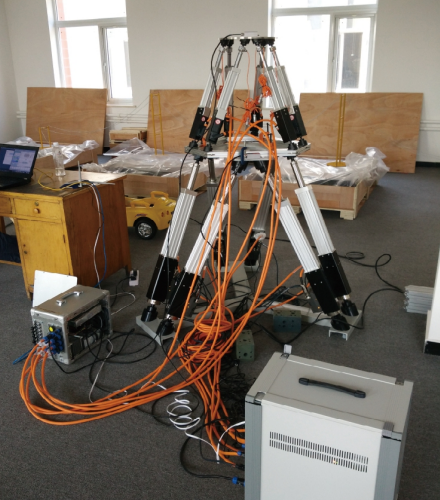
减摇装置
采用六自由度运动平台模拟船舶的运动,在其上部安装六自由度Stewart平台作为减摇装置,将船舶运动平台的位姿实时反馈到Stewart减摇平台的控制系统中,通过减摇控制算法获得减摇平台的控制信号,对Stewart减摇平台进行同步控制,实验结果证明减摇效果非常有效,理论上可以达到静止的效果。航行在海上的船舶会受到海浪海流等多种因素的影响,安装在船上的设备也会受到这些因素的影响,有些设备由于工作的需要必须保证其一定的静止状态,因此必须采用减摇措施。其原理和概念上类似于波浪补偿和设备隔振。本文所研发的减摇模拟器有两部分组成,模拟船舶运动的摇摆平台采用八缸冗余六自由度平台,该方式具有结构尺寸大,受力均匀,特别适合于长方形台面的布置。另一部分是减摇平台,采用的是六自由度Stewart并联平台,该平台的特点是刚度大、承载能力强、动态响应快等优点,并且已经获得了广泛的应用,如加工中心、机器人、运动模拟器、空间宇航器对接、水下救援器对接、大型射电望远镜的轨…
动感座椅与汽车驾驶模拟器

对接装配平台

搜索产品
社交媒体
Copyright 2017 www.tuts.com.cn All Rights Reserved | Powered by Deerpu | 北京三强同维机电液压科技发展有限公司 |京ICP备2025104320号